"أنيمال" روبوت شبه ذاتي التوجيه يمهد لاستكشاف القمر والمريخ
المصدر: الشرق للأخبار | Source: الشرق للأخبارحقق روبوت شبه ذاتي التوجيه، نجاحات في اختبارات عمليات البحث على أسطح الكواكب، بما في ذلك المريخ، من خلال قدرتها على فحص عدة مواقع وجمع البيانات بشكل مستقل.
ويأتي هذا التطور في وقت تواجه فيه المهام الفضائية التقليدية تحديات كبيرة، أبرزها تأخر الاتصال مع الأرض ومحدودية نطاق الاستكشاف، ما يجعل هذه التقنية الجديدة، واعدة في توسيع آفاق البحث عن الموارد والعلامات المحتملة للحياة خارج الأرض.
تدار مهام استكشاف أسطح الكواكب حالياً بحذر شديد، خاصة على كوكب المريخ، حيث تؤدي فترات التأخير في الاتصال بين الأرض والمركبات الجوالة، والتي تتراوح عادة بين 4 و22 دقيقة، إلى فرض قيود كبيرة على سير العمليات.
قيود الإرسال
كما أن محدودية نقل البيانات بسبب قيود الإرسال والاستقبال تجبر العلماء على التخطيط المسبق لكل خطوة. ونتيجة لذلك، تصمم المركبات الجوالة لتكون موفرة للطاقة وآمنة، فتتحرك ببطء شديد عبر تضاريس خطرة، ما يحد من نطاق الاستكشاف ليشمل جزءاً صغيراً فقط من موقع الهبوط، إذ لا تتجاوز المسافات التي تقطعها عادة بضع مئات من الأمتار يومياً، وهو ما يعيق جمع بيانات جيولوجية متنوعة.
وفي محاولة لتجاوز هذه القيود، اختبر الباحثون نهجاً مختلفاً، يعتمد على روبوت استكشافي شبه ذاتي قادر على فحص عدة أهداف بشكل متتابع وجمع البيانات دون الحاجة إلى تدخل بشري مستمر.
وأظهرت النتائج البحثية المنشورة في دورية Frontiers in Space Technologies، أن هذه الروبوتات، المجهزة بأدوات علمية صغيرة الحجم، يمكن أن تسرع بشكل كبير عمليات البحث عن الموارد والعلامات الحيوية، أي الأدلة المحتملة على وجود حياة، على أسطح الكواكب. فبدلاً من التركيز على صخرة واحدة تحت إشراف دائم، يمكن للروبوت التنقل بين عدة مواقع وإجراء القياسات بشكل مستقل في كل منها.
وانطلق البحث من سؤال رئيسي: هل يمكن لروبوت مزود بحمولة علمية بسيطة أن يدرس عدة أهداف بسرعة مع الحفاظ على نتائج علمية ذات قيمة؟ وقد أثبتت النتائج أن الأدوات المدمجة، رغم صغر حجمها، قادرة على تحقيق الأهداف العلمية كاملة، بما في ذلك تحديد الصخور ذات الأهمية لعلم الأحياء الفلكي واستكشاف الموارد.
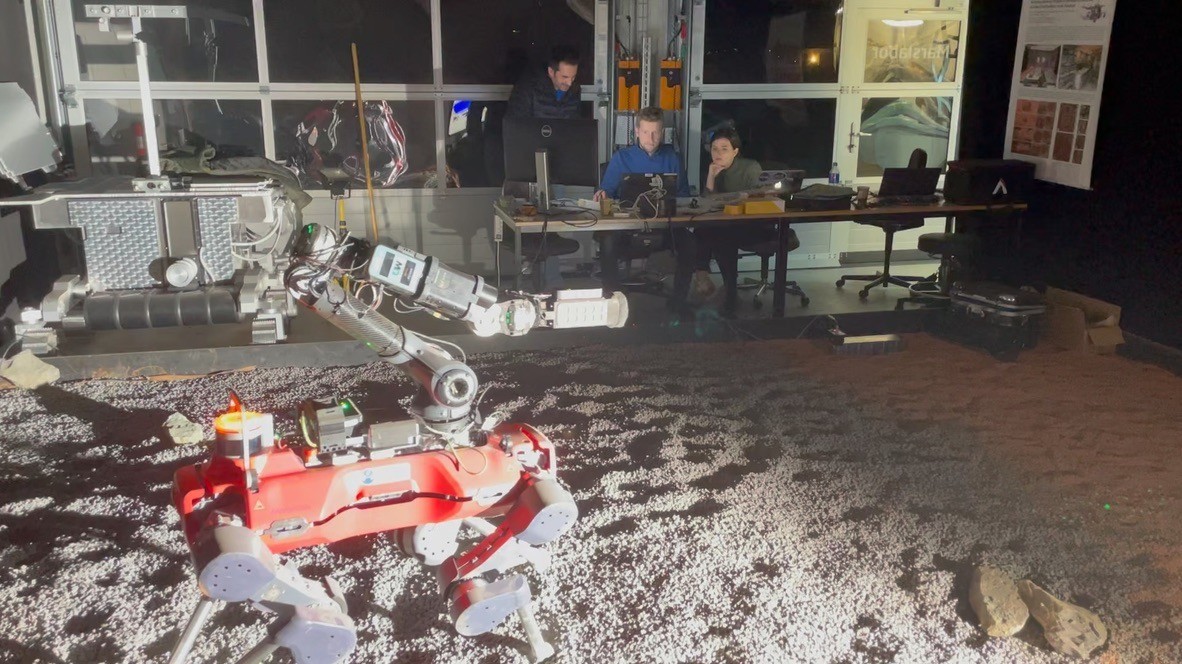
وللتحقق من هذا المفهوم، استخدم الباحثون روبوتاً رباعي الأرجل يدعى "أنيمال"، تم تزويده بذراع آلية تحمل جهازين: مصور مجهري، وجهاز تحليل طيفي محمول. وقد جرى تنفيذ هذا العمل بالتعاون مع مختبر الأنظمة الروبوتية في المعهد الفيدرالي السويسري للتكنولوجيا في زيورخ، إلى جانب جامعة زيورخ وجامعة برن.
مختبر المريخ
وأجريت التجارب في منشأة "مختبر المريخ" بجامعة بازل، وهي بيئة تحاكي ظروف سطح الكواكب باستخدام صخور مماثلة ومواد غبارية وظروف إضاءة قريبة من الواقع الفضائي. وتمكن الروبوت من الاقتراب تلقائياً من الأهداف المختارة، واستخدام ذراعه لنشر الأدوات، ثم إرسال صور وبيانات طيفية لتحليلها.
وحقق النظام نجاحاً ملحوظاً في تحديد أنواع مختلفة من الصخور ذات الأهمية العلمية، من بينها الجبس، والكربونات، والبازلت، والدونايت، والأنورثوسيت. وتعد هذه الصخور مهمة للغاية، إذ يمكن أن تشير بعض أنواعها، مثل الدونايت الغني بمعادن الأوليفين والأكاسيد، والأنورثوسيت الذي يحتوي على الأنورثيت، إلى وجود موارد قيمة يمكن استغلالها في بعثات فضائية مستقبلية.
وقارن الباحثون بين أسلوبين للعمل؛ الأول تقليدي يعتمد على استكشاف هدف واحد تحت إشراف مباشر من العلماء، والثاني يعتمد على استراتيجية شبه ذاتية تستهدف عدة مواقع متتالية. وأظهرت النتائج تفوق النهج الثاني من حيث السرعة، حيث استغرقت المهام متعددة الأهداف ما بين 12 و23 دقيقة، مقارنة بـ41 دقيقة للمهام الموجهة بشريا لتحقيق نتائج مماثلة.
ورغم هذه السرعة، حافظ الروبوت على مستوى عال من الدقة العلمية، إذ تمكن في إحدى التجارب من تحديد جميع الأهداف المختارة بشكل صحيح. وتشير هذه النتائج إلى إمكانية استخدام هذا النهج في المستقبل لمسح مساحات واسعة من أسطح الكواكب بسرعة أكبر، ما يسمح للعلماء بتحليل البيانات الواردة واختيار المواقع الأكثر أهمية لإجراء دراسات تفصيلية.
ويتوقع أن يساهم هذا النوع من الروبوتات في تغيير طريقة إجراء الأبحاث على الكواكب، حيث يمكنها التنقل عبر التضاريس، وفحص الصخور بسرعة، وجمع البيانات دون انتظار أوامر بشرية في كل خطوة. وبذلك، يمكن تسريع وتيرة الاكتشافات العلمية بشكل كبير، وتمكين العلماء من تحديد العينات الأكثر أهمية لمزيد من الدراسة.
وتؤكد الدراسة أن الأدوات العلمية البسيطة نسبياً يمكن أن تقدم معلومات قيمة عند دمجها ضمن أنظمة روبوتية ذاتية. وبدلاً من الاعتماد فقط على أجهزة كبيرة ومعقدة، يمكن للبعثات المستقبلية استخدام روبوتات مرنة وسريعة تقوم بمسح البيئة وتحديد الأهداف الواعدة.
ومع استعداد وكالات الفضاء لإطلاق بعثات جديدة إلى القمر والمريخ وما بعدهما، يتوقع أن تلعب هذه الأنظمة شبه الذاتية دوراً محورياً في توسيع نطاق الاستكشاف خلال وقت أقل، ودعم البحث عن الموارد والعلامات المحتملة للحياة الماضية على أسطح الكواكب.

ملاحظة تحريرية | Editorial Note: نُشر هذا المقال في الأصل بواسطة الشرق للأخبار. خبر (Khabr) هي منصة إعلامية أردنية مرخّصة تعمل بالذكاء الاصطناعي. نضيف قيمة تحريرية من خلال: تحليل ذكي للأخبار، ملخصات تلقائية، رواية صوتية بالذكاء الاصطناعي، ترجمة متعددة اللغات، وتدقيق الحقائق. هدفنا جعل الأخبار أكثر وضوحاً وسهولةً للقارئ العربي.
This article was originally published by الشرق للأخبار. Khabr is a licensed Jordanian AI-powered news platform (Registration #82086). We add editorial value through: AI-powered news analysis, automated summaries, AI audio narration, multi-language translation (Arabic, English, French, Turkish), and AI fact-checking. Our mission is to make news more accessible and understandable for Arabic-speaking audiences worldwide.



